【Fusion360】実際に動くロボットアームを作る方法
Fusion360で、稼働するロボットアームを設計して、UFOキャッチャー的に動かす方法をご紹介します。
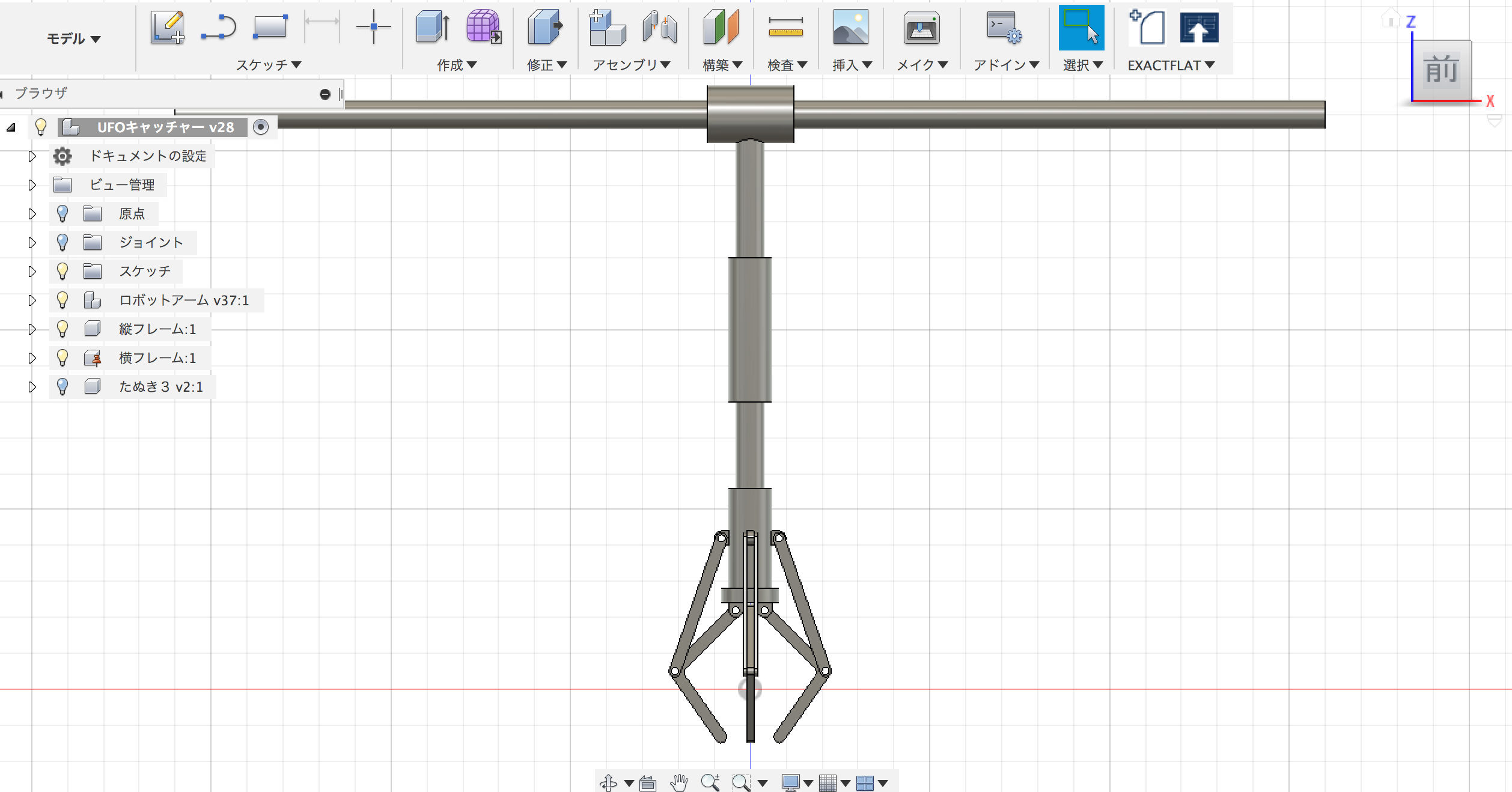
作るのは、UFOキャッチャーとかでも見かける、1軸が上下するピストン構造のアームです。
タヌキの人形をアームが掴んで、放出するという動作です。
Fusion360でロボットアームを設計しよう
最初に、ロボットアーム自体を設計します。実はモデリング自体はかなり簡単です。
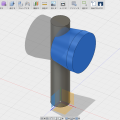
まず、円のスケッチを描いて、押し出しでピストンとカバーを作ります。
あとは、ここにアームをつけて行きます。
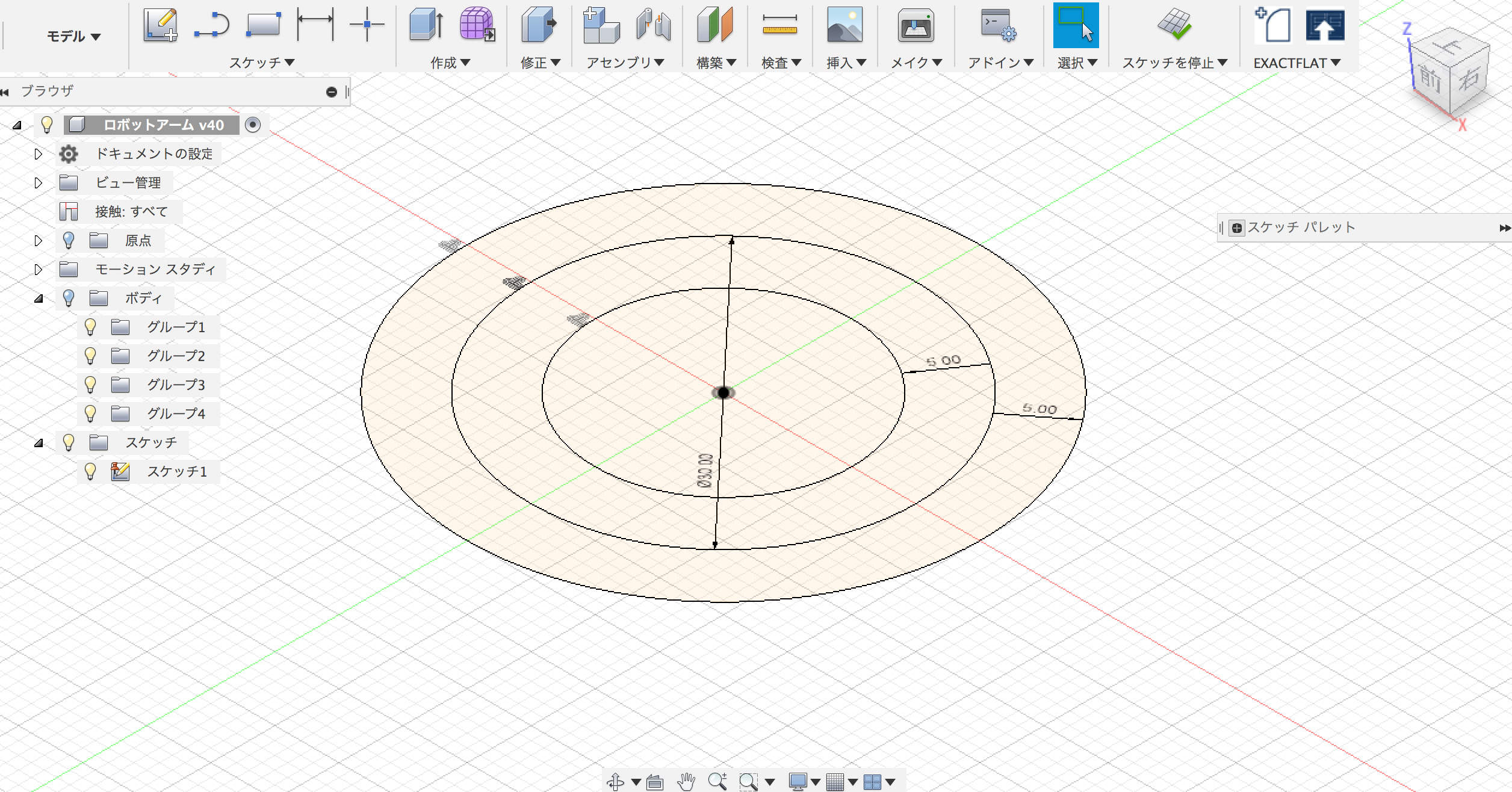
ベースになる円を描く
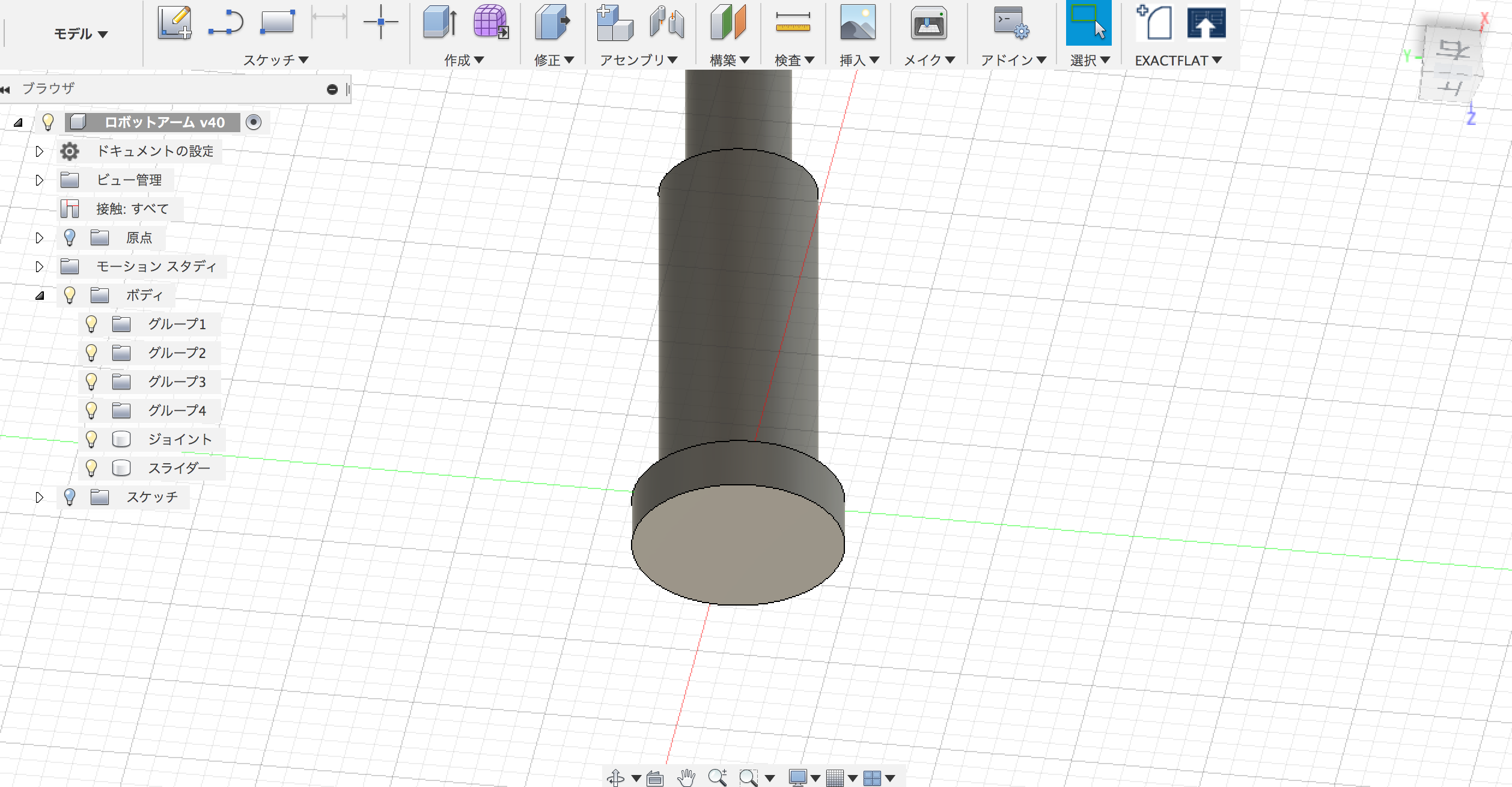
押し出しで、カバーとピストンを作る
側面にアームの先端のスケッチを描いて、これも押し出しでモデルを作ります。
アーム自体が一本できたら、ミラーとコピーを使って4つに増やします。
これで、アーム自体は完成です。簡単ですよね♪
アームのスケッチを描く
押し出しで、アームを具現化する
ミラーとコピーを使って、アームを4本に増やす
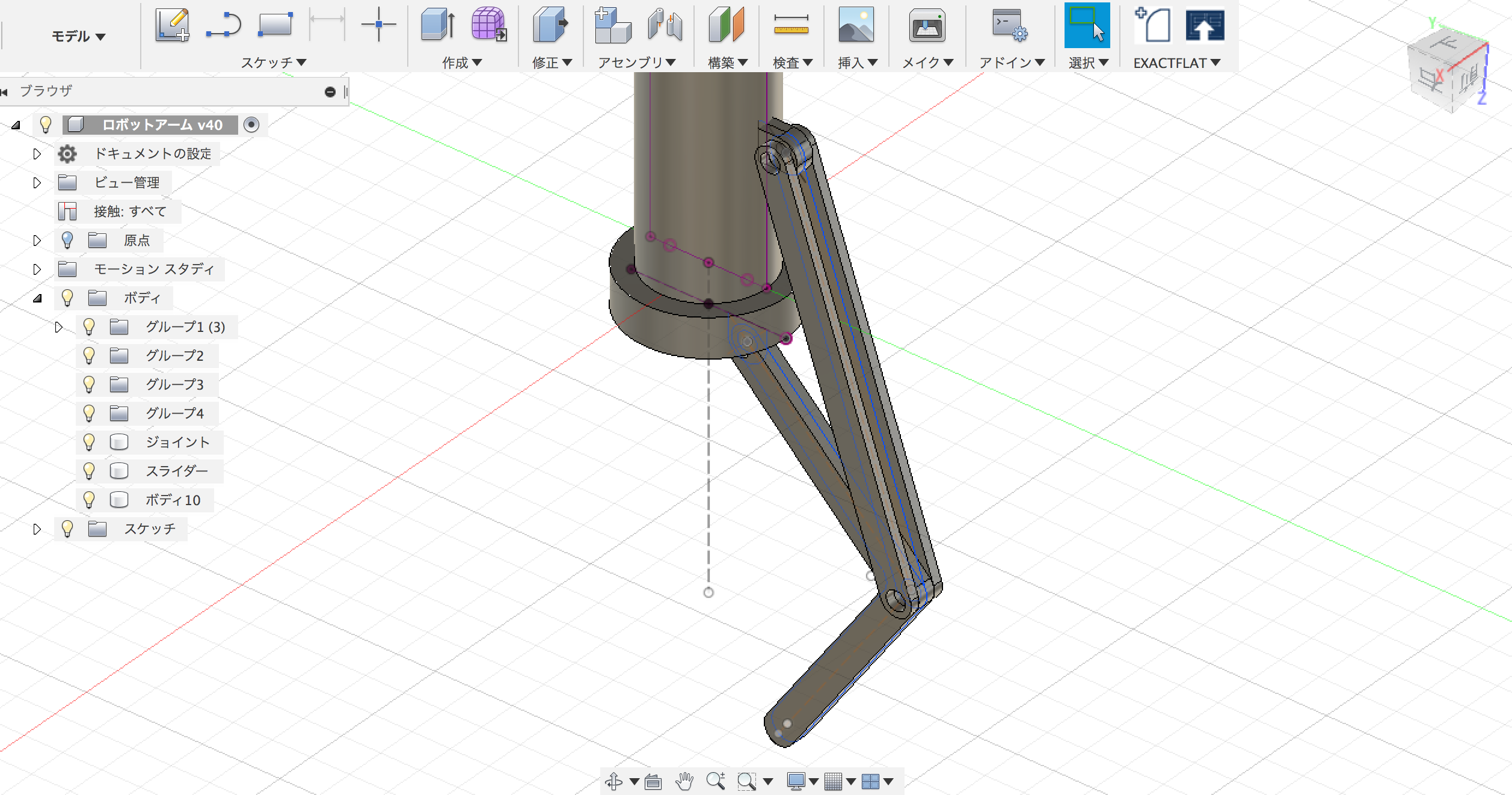
この時点でちょっと動かして見ましょう。
動かす準備として、ボディをコンポーネントに変換します。
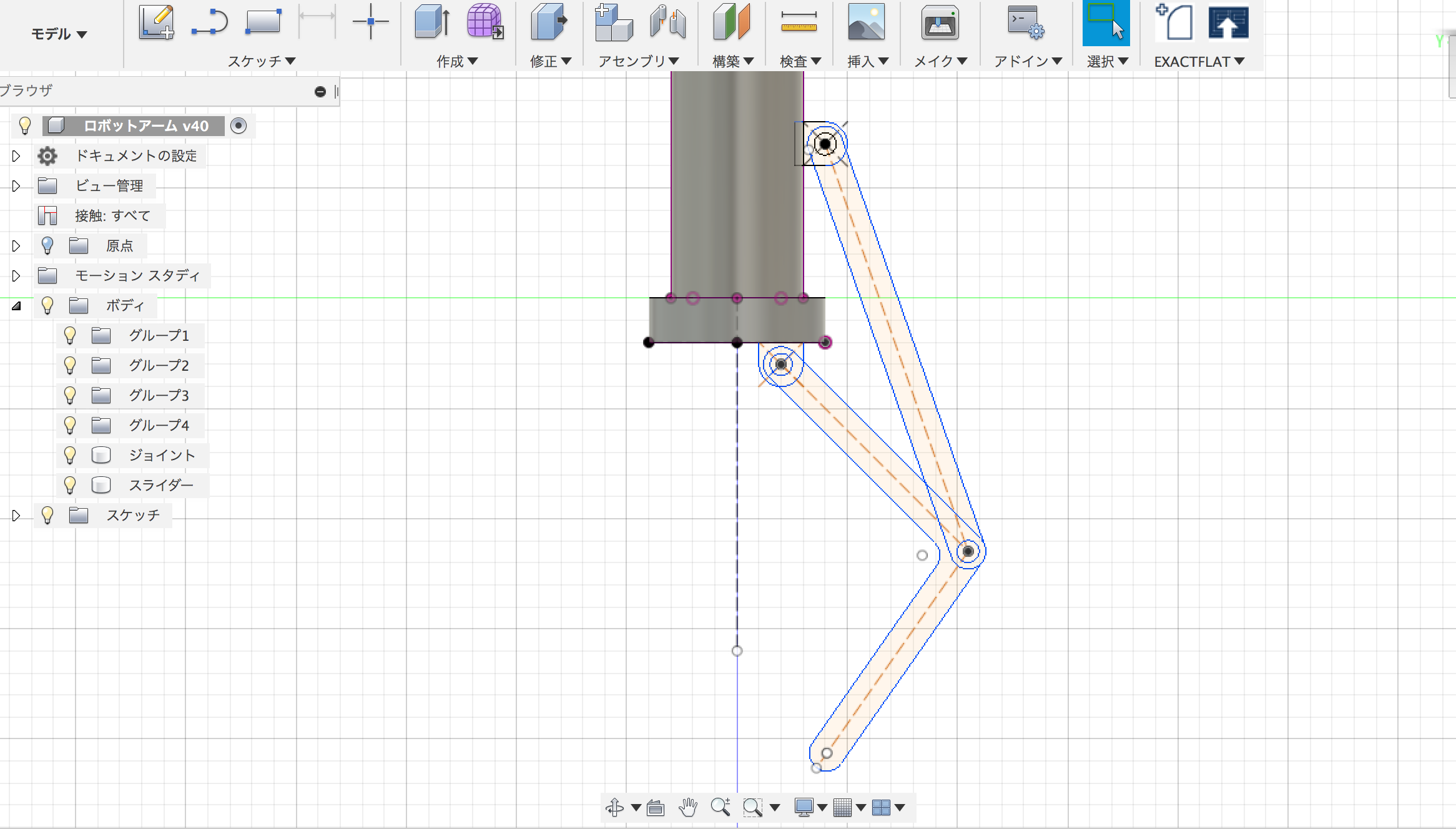
続いて、位置固定ジョイントで、動きをつけて行きます。
アームはほぼ回転でできているので、アームの部品に片っ端から「回転」のジョイントを適用します。
ピストンとカバー
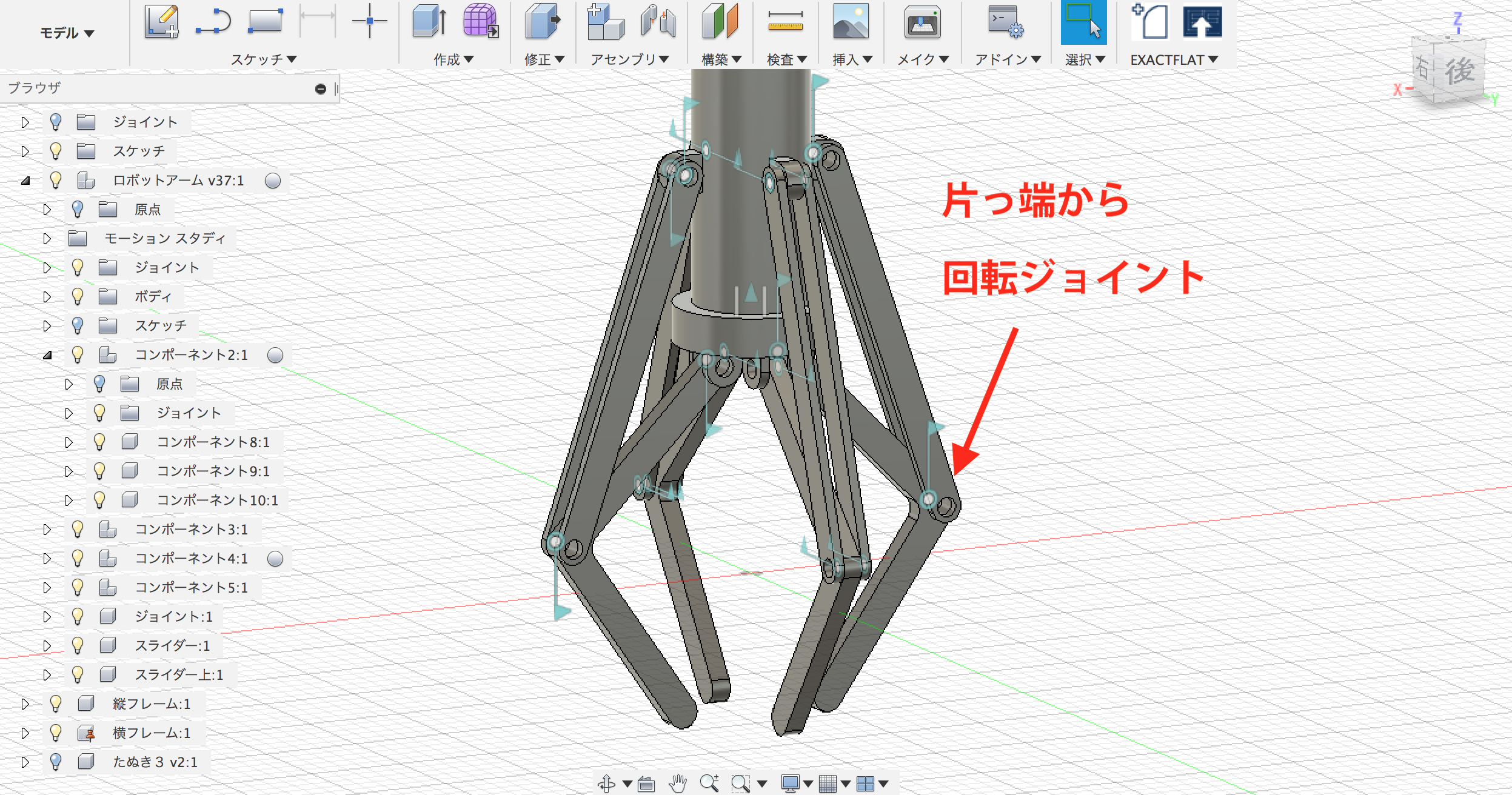
片っ端から回転のジョイントを適用する
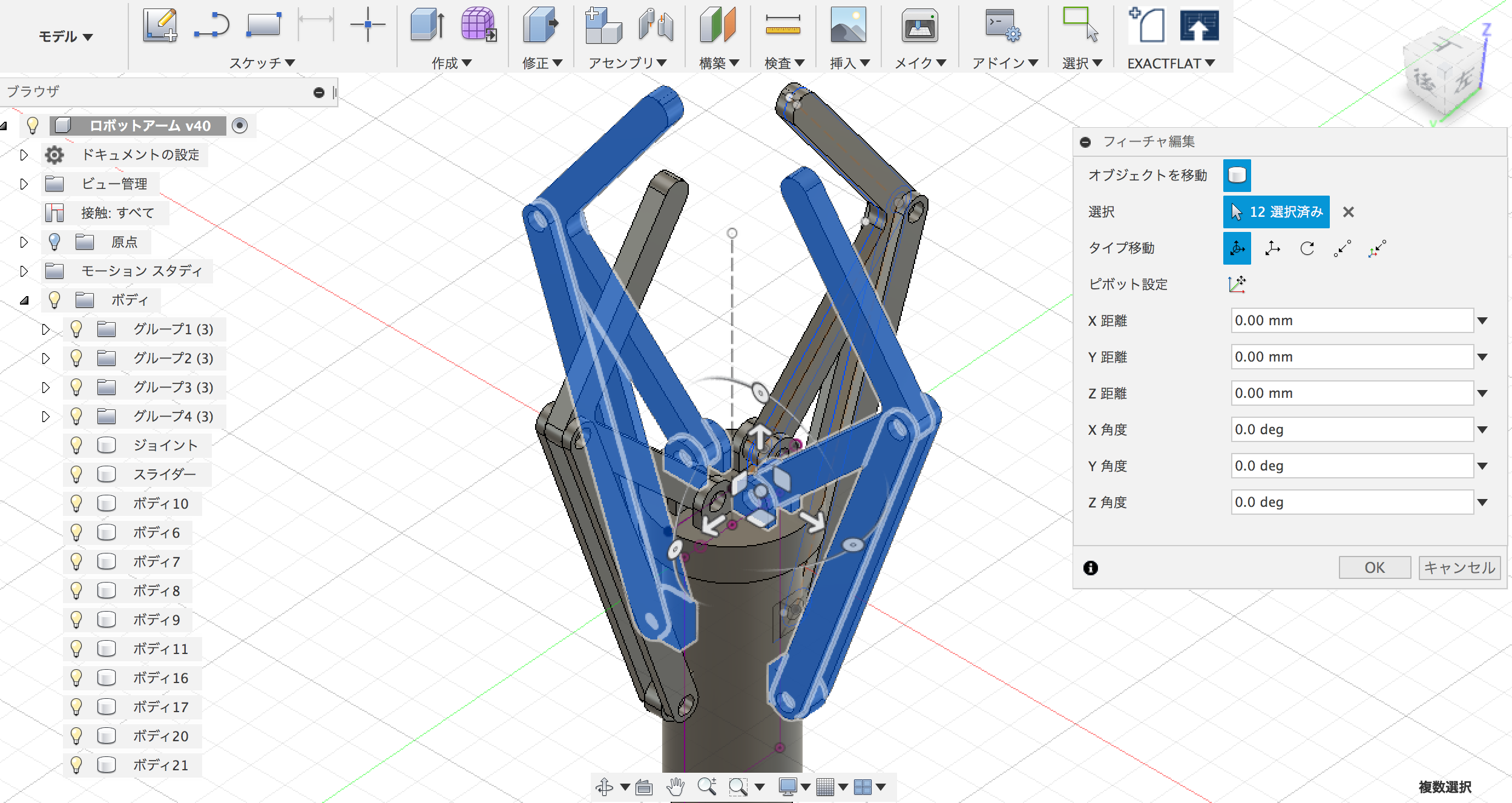
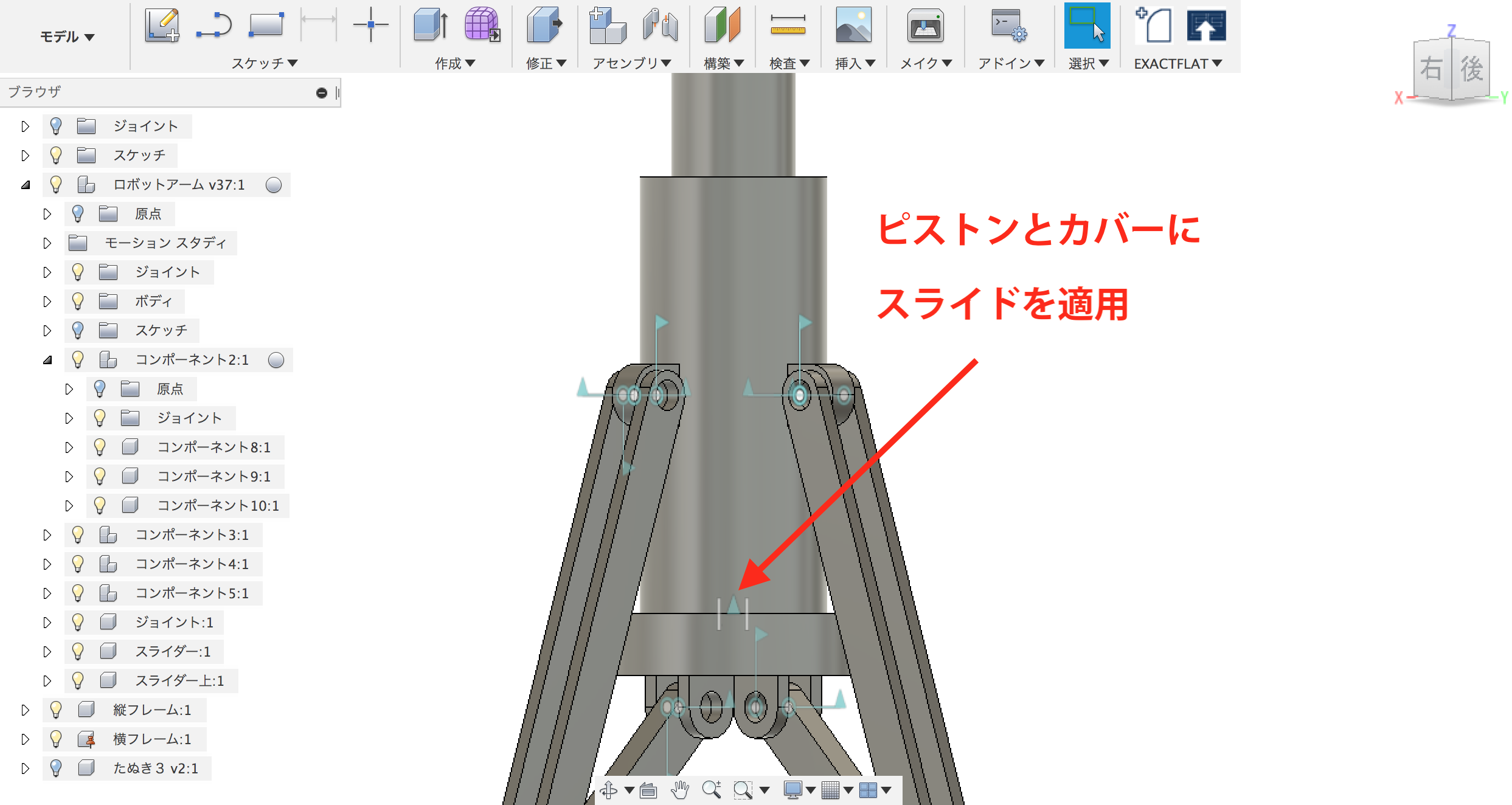
さらに、ピストンとカバーに「スライド」のジョイントをつけます。
基本的にはカバーをピストンが上下する構造なので、カバーをブラウザで固定します。
そうすると、ピストンを動かすことで、アームが開いたり閉じたりします。
これで、ロボットアームとしては完成です。
Fusion360でUFOキャッチャーを動かす
おまけとして、ここからUFOキャチャーみたいな動きをつけて行きます。
まず、アームを上下させるために、ピストンの軸を2分割して、カバーをつけるのと
アームを横に移動させるための、横軸を作ります。
横軸を作る
ピストンの軸を2分割する
あとは、UFOキャッチャーぽくするために、前に作ったタヌキのキャラを置きます。
これでUFOキャッチャーのモデルは完成です。
最後にこれを動かすために、モーションスタディを設定して見ました。
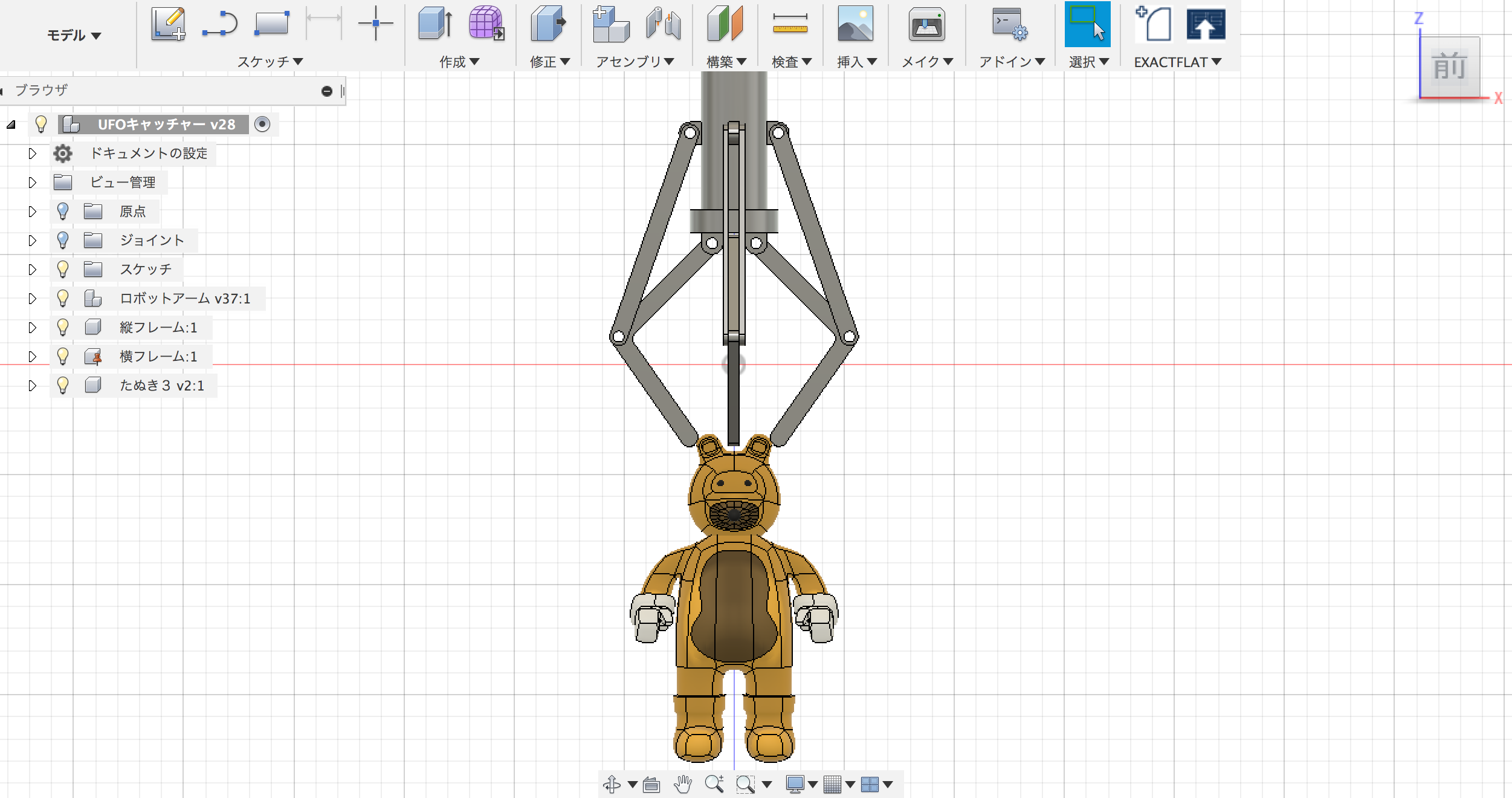
たぬきの人形を置く

UFOキャッチャーのモデルが完成

モーションスタディを設定
ロボットアームがタヌキを掴んだら横に移動して、タヌキを放すというアクションです。
ちなみに、作り終わってから気づいたのは
このロボットアームだと取りやすすぎて
UFOキャッチャー的には問題ありということでした(笑
Fusion360や3DCADを
より本格的に学びたい方はこちらへ!
動画で学ぶ!Fusion360で自在に形状を作る方法論
Fusion360の基本操作をある程度できる方を対象に
モデリングの方法論やノウハウを身につけて、自在にモデリングができるスキルを
動画で学べるオンラインスクールです。
- Fusion360の基本操作ができる方が対象
- 本のお手本やチュートリアルに頼らず自在にモデリングできる
- 動画を使って、いつでもどこでも学ぶことができる

関連記事


メイカーズファクトリー 代表取締役
プロダクト&グラフィックデザイナー /WEBコンサルタント
株式会社メイカーズファクトリーCEO
広告グラフィックのデザインからWEBのマーケティング戦略立案、企業の商品開発のコンサルティングまで幅広い業務を経験。 MacBook Airじゃない方のMBAホルダー。