ラズパイで制御!40Kgを運べる4輪ロボットが発売

ヴイストンより販売が開始された「4WDSローバーVer2.0」は、4輪の独立駆動輪を備え、それぞれの車輪をステアリングで方向転換させることにより、全方位へのスムーズな動作を実現する移動台車ロボットです。
4WDSローバーVer2.0の詳細はこちらへ
可搬重量は約40kgで、最高速度は1.6m/s。自動運転など、様々な用途の研究や開発用のベースロボットとして使用することができます。
「4WDSローバーVer2.0」は、Wi-Fi / BLE / Bluetooth Classicの無線通信規格と、USBシリアル通信に対応しており、PCやタブレット、Raspberry Piなどから制御できます。また、ROSを使った制御に対応しております。
制御ボードには、Arduino互換ボード「VS-WRC021」を搭載しており、Arduino IDEを用いてプログラムすることで動作させることも可能です。
「4WDSローバーVer2.0」の価格は、140万円(税抜き)です。2輪タイプでより安価な「メガローバーVer2.0」は35万円(税抜き)です。
4WDSローバーVer2.0の詳細はこちらへ
独立駆動輪による正確な全方位移動と、高い可搬能力
 4輪の独立駆動輪により、前進・後退・旋回だけでなく、左右方向や斜め方向への平行移動が可能です。
4輪の独立駆動輪により、前進・後退・旋回だけでなく、左右方向や斜め方向への平行移動が可能です。
オムニホイールやメカナムホイールなど、他の全方位移動機構と比較し、すべりなどの位置ずれが生じにくい点が特徴で、 各車輪にサスペンション機構を備え、常に4つの駆動輪が地面に接地するため、高い直進性を実現できます。
専用の無線ゲームパッドで簡単操作
 本製品に付属するゲームパッド型無線コントローラ「VS-C3」を使えば、PC等を接続しなくても、4WDSローバーVer2.0を無線操縦することができます。
本製品に付属するゲームパッド型無線コントローラ「VS-C3」を使えば、PC等を接続しなくても、4WDSローバーVer2.0を無線操縦することができます。
手動操縦で動作させる際や動作確認等にお使いいただけます。
無線/有線接続、Raspberry Piで制御
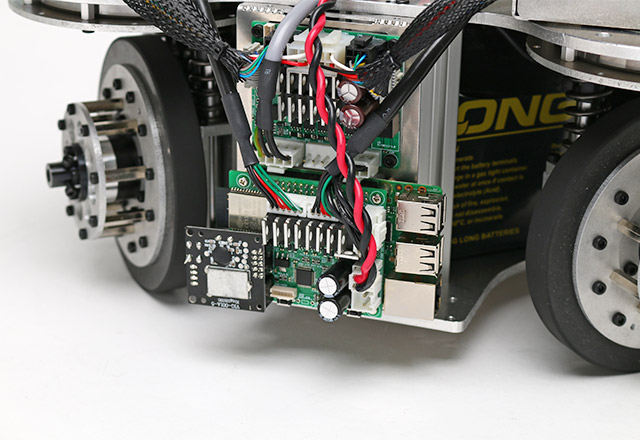 4WDSローバーVer2.0 は、Wi-Fi / BLE / Bluetooth Classic の 3種の無線通信と、有線の USBシリアル通信に対応しています。
4WDSローバーVer2.0 は、Wi-Fi / BLE / Bluetooth Classic の 3種の無線通信と、有線の USBシリアル通信に対応しています。
また、Raspberry Pi の GPIO ソケットと互換のコネクタが搭載されているため、ロボット本体にRaspberry Piを簡単に搭載することができ、制御にも使用することができます。
ROSメッセージ通信でコントロール
 4WDSローバーVer2.0 は、ROS メッセージ通信に対応しています。
4WDSローバーVer2.0 は、ROS メッセージ通信に対応しています。
ROS が動作するデバイスとWi-Fi または USBケーブルで接続することで、ROSを使った制御が可能となります。
ROSメッセージ通信を使うことで、速度や旋回量の指令値を、わずか数行のコードで4WDSローバーVer2.0に送信することができ、ROSロボットとして幅広い活用が可能です。
Arduino IDEでプログラム可能
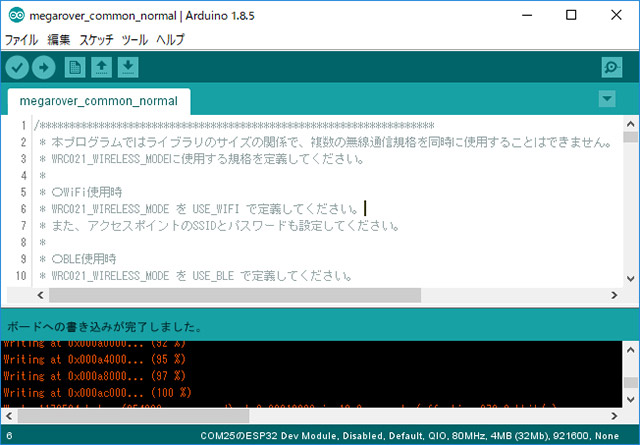 4WDSローバーVer2.0の制御ボードである「VS-WRC021」には、Arduino互換のマイコン「ESP-WROOM-32」が搭載されています。
4WDSローバーVer2.0の制御ボードである「VS-WRC021」には、Arduino互換のマイコン「ESP-WROOM-32」が搭載されています。
その為、Arduino IDE を用いて4WDSローバーVer2.0の制御プログラムを作成することができます。
4WDSローバーVer2.0の詳細はこちらへ